|
如果聊到PID,做过化工设计相关的人,第一反应就是管道及仪表流程图(Piping and Instrument Diagram,P&ID)。但如果你是专门做自动控制的人,那么这三个字母就有着更深刻更重要的含义,它代表着自动控制当中三个最基本控制规律。 控制器的形式虽然有很多,但是从控制规律来看,基本控制规律就那么有限的几种,而最重要的有比例控制(P: proportional control)、积分控制(I:integral control)和微分控制(D:differential control)这三种。当然还有一个位式控制,不过用的不多。 除了单独使用,现实工业当中的基本控制都是这几种控制规律的组合,例如比例积分控制(PI)、比例微分控制(PD),比例积分微分控制(PID)。它和P&ID图相同的缩写应该只是个巧合。如果你需要进行控制方案的设计和模拟,那么理解这三种基本控制规律及其应用场合就是最基础的知识点。 控制规律指的就是控制器的输出信号(p或△p)与输入信号(偏差e)的关系。也就是当有一个偏差e存在时,通过一个怎样的计算来确定输出信号使体系重新稳定。我们在判断控制方案的好坏时,会给系统一个阶跃且持续的偏差e,因为这种偏差最为难以控制,如果这种偏差都可以控制,那么这个控制方案也能应对其他形式的波动偏差。 阶跃且持续的偏差
比例控制 首先是比例控制,基本表示形式就是下面这个公式,当存在一个偏差时,通过一个比例增益KP,得到输出信号的值,偏差越大,输出的调整信号也就越强,因此比例控制的特点就是反应快,控制及时。 比例控制的数学描述
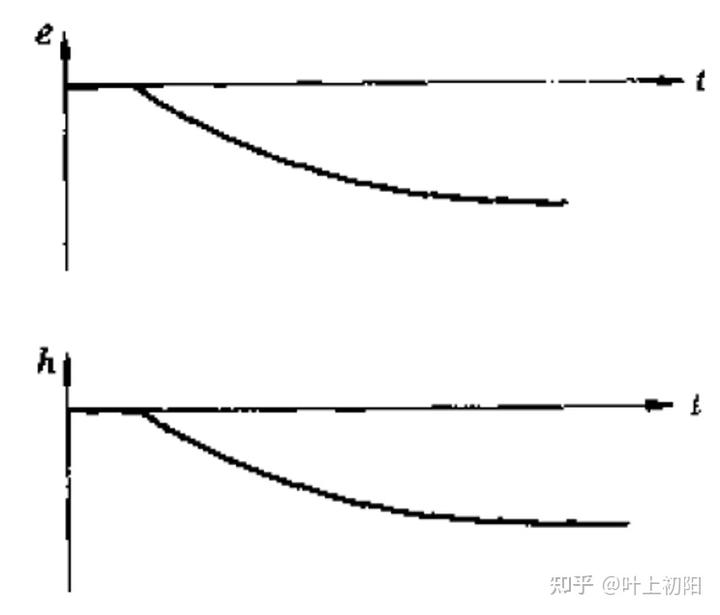
而其最大的问题就是余差的存在,这是比例控制的必然结果,比例控制稳定后,并不会处在原有的稳定值,而是得到一个新的稳定值。例如一个简单的液位控制,如果出料产生一个突增,那么液位就会慢慢下降,通过比例控制,进料阀门开度逐步增加,以减缓液位下降的速度,最后进料和出料达到新的平衡,此时液位就会处于一个新的较为稳定的低位。整个过程的偏差和液位变化如下图所示。
积分控制 如果说对于控制的变量只有稳定但对具体值没有严格要求的情况就可以仅使用比例控制,但是实际工业上我们一般对控制的变量有更加严格的要求,不仅仅需要稳定而且需要消除余差,此时就需要用到积分控制,KI是积分速度。消除余差是积分控制最主要的用途。 积分控制的数学描述如果我们将输入的偏差e固定(为常数A),可能会更好地理解积分控制的效果,上面的式子会变成下式 也就是说,只要有偏差A的存在,那么输出信号就会随着时间而不断增强,直到消除偏差。可以看到积分控制的输出信号是由弱变强的,也就是说它的控制有时会不及时,所以常常把比例控制和积分控制组合起来,也就是比例积分控制。 比例积分的数学描述微分控制 以上两个控制看起来已经可以很好地控制很多场合了,但是当我们遇到一些惯性很大的对象(被控变量变化很快),我们会希望通过监控其变化快慢来进行控制,这就需要用到微分控制,TD是微分时间。 微分控制的数学描述微分控制只关注变化趋势快慢,而不关注实际的值,有时候即使偏差值很小,但变化很快,微分控制就会立马起作用,所以它可以起到超前控制的作用。但是它对于偏差很大,但是偏差变化很缓慢的情况就无能为力了,所以微分控制不单独使用,而是组合成比例微分控制或者比例积分微分控制。 比例微分控制比例积分微分控制当然实际的控制元件一般都同时具备这三种控制规律,通过调整参数来实现不同控制规律的组合。如果需要设置成比例积分控制,那么微分时间就设置成0;如果需要设置成比例微分控制,那么积分速度就设置成0(或者积分时间TI设置成无穷大)。虽然工业上在简单控制的基础上还会使用很多复杂控制系统,但是依旧是以比例P、积分I和微分D这三个控制规律为基础。只有掌握这个,才能用好Aspen plus Dynamics。 参考文献: 《化工仪表及自动化》,厉玉鸣. 小编能力有限,如有错误,还请及时指正。 注:文章首发公众号“化工研学社”,知乎号“叶上初阳”,欢迎关注!
**
| 


 发表于 2022-8-7 09:50:13
显示全部楼层
发表于 2022-8-7 09:50:13
显示全部楼层




 IP卡
IP卡 狗仔卡
狗仔卡 楼主
楼主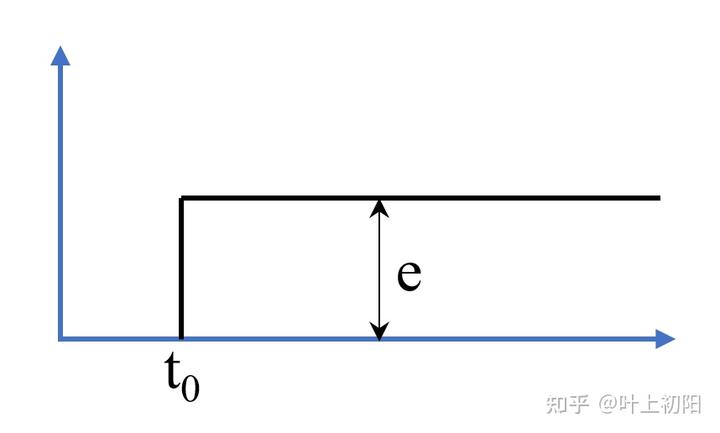



 提升卡
提升卡 置顶卡
置顶卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 显身卡
显身卡

